
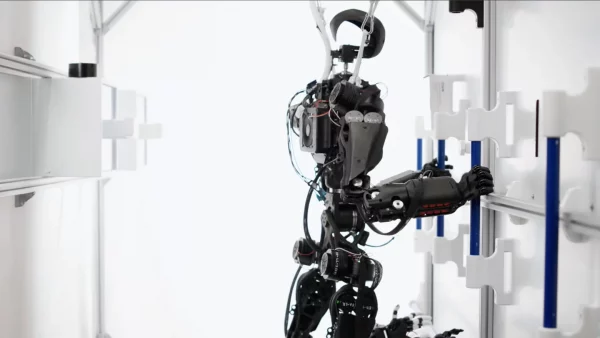
[星岛综合报道]由瑞士苏黎世联邦理工学院(ETH Zurich)衍生企业 Orbit Robotics 开发的 Helios,是一款专门针对太空站失重环境而设计的机械人。开发团队认为,在没有重力的太空环境中,双脚并无实际用途,因此 Helios 舍弃传统人形机械人的双腿设计,改以四只机械臂作为主要活动及工作工具。
Helios 最大特色是拥有四只机械臂,其中两只可抓紧太空站内部结构作为固定支点,另外两只则负责搬运货物、操作工具及移动设备。这种设计令机械人能够在零重力环境下保持稳定,同时执行工作,避免因施力而令自身漂离原来位置。
在结构方面,Helios 采用肌腱驱动系统,将马达集中设置于肩部,再透过缆线及滑轮传递力量至各个关节,以减轻手臂末端重量,同时保持灵活的活动能力。其手肘位置亦加入滚动接触关节设计,可提供更平顺及精准的动作控制,减少突然震动对机械人及周边设备造成影响。

Orbit Robotics 表示,Helios 的定位并非取代太空人,而是协助处理大量重复性工作,例如整理物资、搬运设备及执行日常维护工作,让太空人能将更多时间投放于科研任务。由于太空站人力资源极为珍贵,透过机械人分担后勤工作,有助提升整体运作效率。
除了太空站内部应用外,开发团队亦期望未来将 Helios 扩展至卫星维修、轨道设施保养及太空建造等范畴,成为新一代太空基础设施的重要辅助工具。
图片:Orbit Robotics
T10
